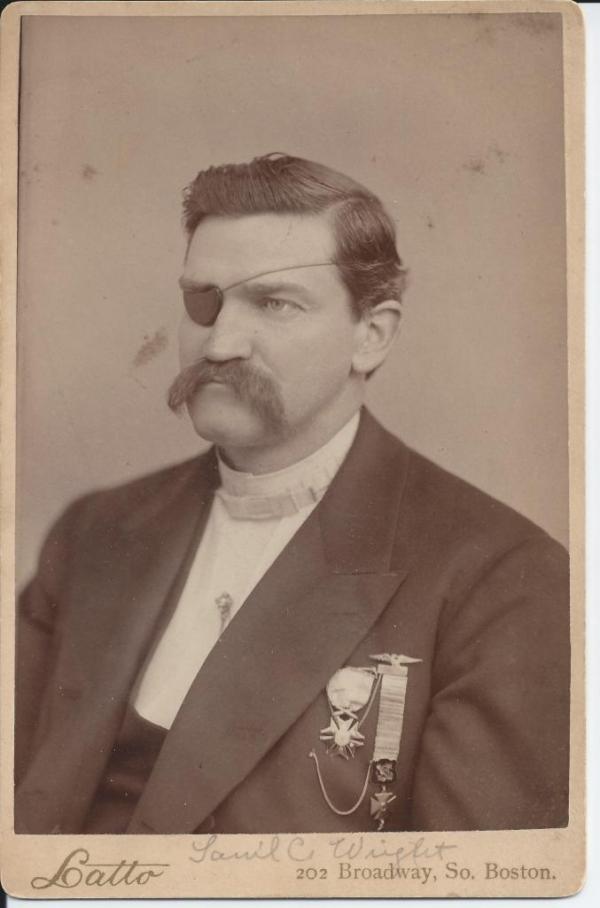
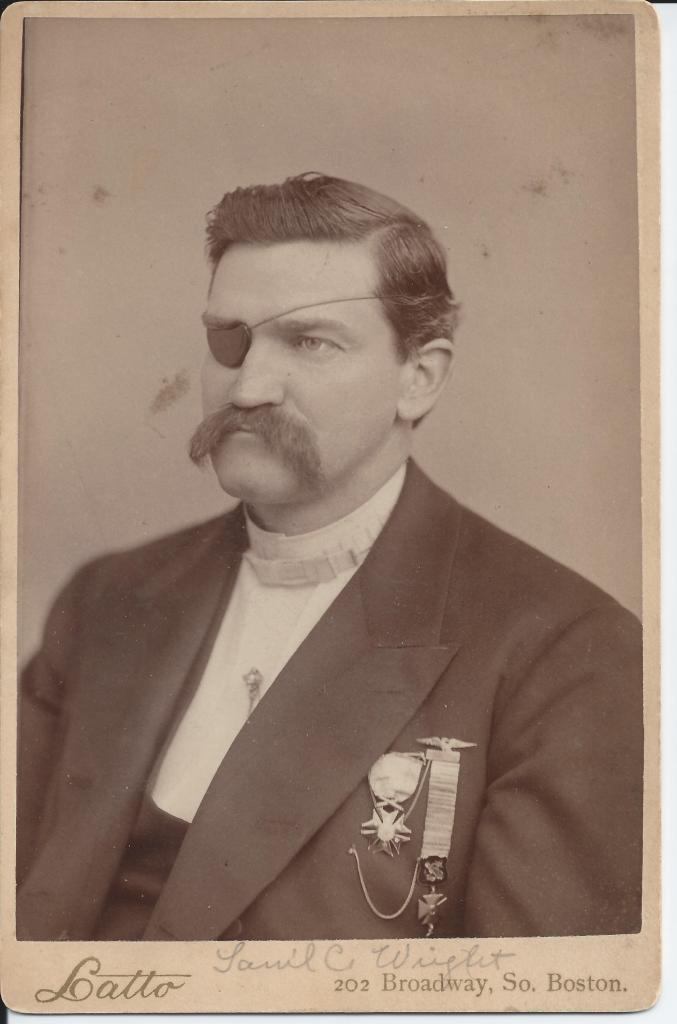
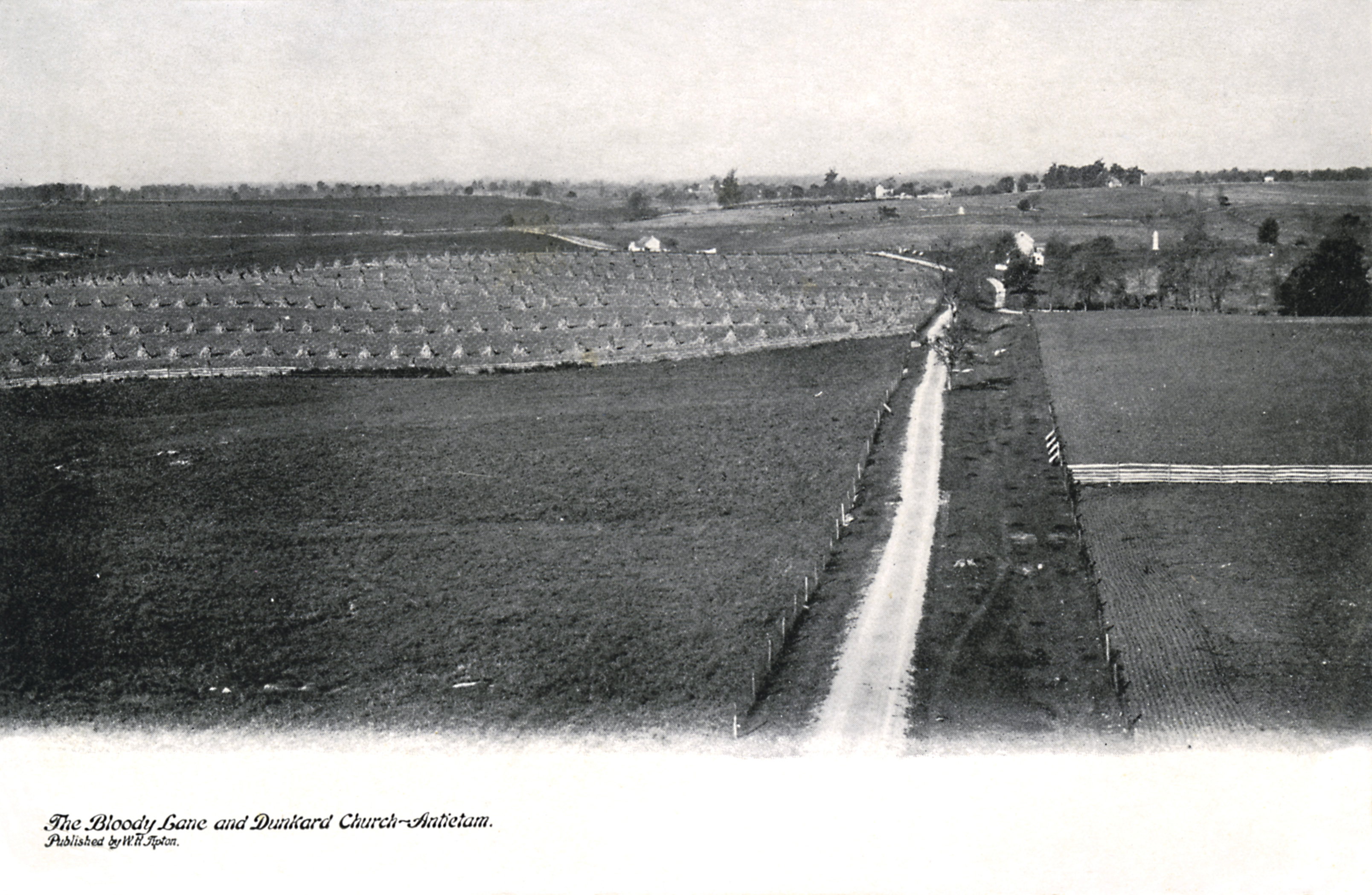
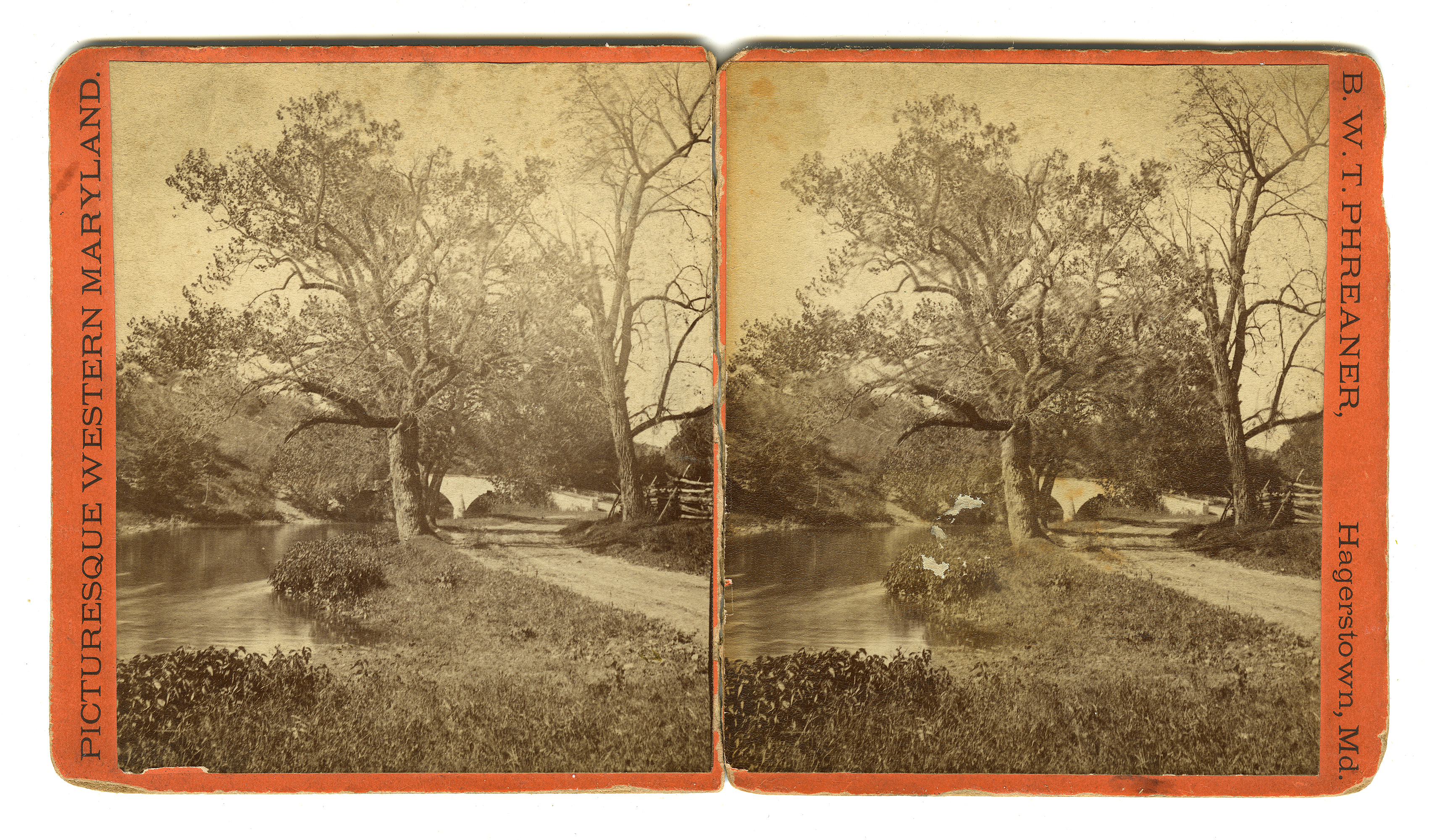
One of the most exciting stories from the Battle of Antietam is young Private Samuel Cole Wright of Plympton, Massachusetts, charging toward the North Carolinians in the Sunken Road as a member of the legendary Irish Brigade. In Samuel's own words: :Some 200 yards in advance of our position, which we were holding at a terrible cost, was a fence built high and strong. The troops in advance had tried to scale the fence and reform under that hell of fire. They were actually torn in shreds and wedged into the fence. The cry came to us for volunteers to pull down the fence. Instantly there sprang from the long line, fast being shortened as the ranks closed up over the dead, seventy-six volunteers. We ran straight for the fence amid a hail of iron and lead, the dead falling all about us, but to reach the fence was our only thought. A part of the force reached it, and, as one would grasp a rail it would be sent flying out of his hands by rifle-shots. The fence leveled, we made the attempt to return, and it was as hot for us on the retreat, as it had been on the advance. Few escaped death or wounds. I had almost regained my regiment, when I was hit. The line then successfully pressed on, and the 'Sunken Road' or 'Bloody Lane' as it is now known, was within our lines."
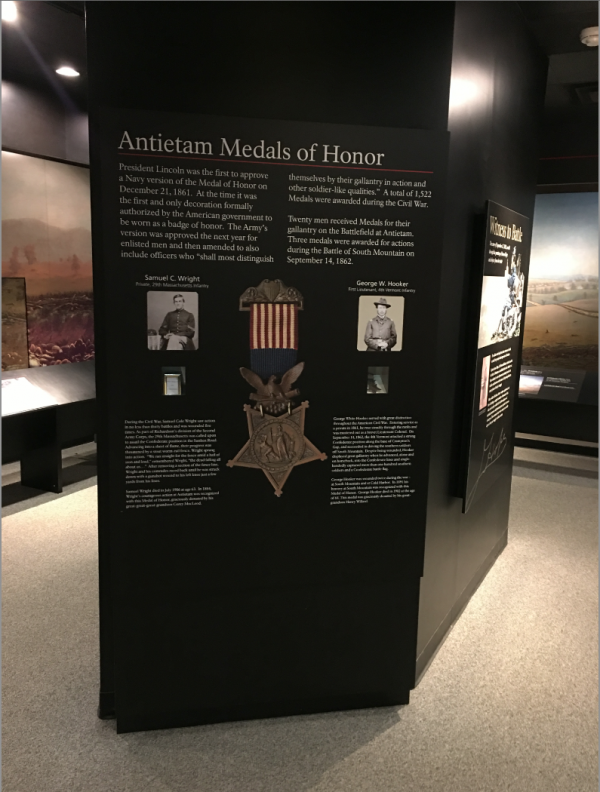
As a result of his actions on this day, Samuel was awarded the Congressional Medal of Honor. Through the good graces of his great-great-great-grandson Corey MacLeod, that medal is on display at Antietam National Battlefield.
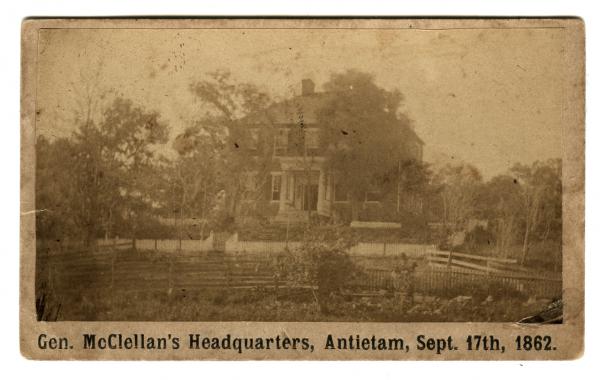
After the battle, Wright took some pieces of that fence home with him. With one piece he created a cane that has two fired bullets that are wrapped in a rose-colored metal that appears to be gold. These bullets were embedded within the fence rail and were removed to turn the cane and returned to their initial location after the cane was finished. Also through the good graces of Corey MacLeod, that cane is now in my personal collection of rare Antietam artifacts.

The folks at Antietam National Battlefield do an amazing job taking great care of this wonderful battlefield. They are taking comments until December 9th on their new ideas about how to improve the visitor experience. One idea they had that I disagree with is that they want to remove the trail that passes along the Wright's fence line and then up to the Bloody Lane along the exact path the Irish Brigade took to their destiny. To respectfully raise awareness of this trail I will post a tour of that trail over the next few days.
You can read about and comment on their plans here.

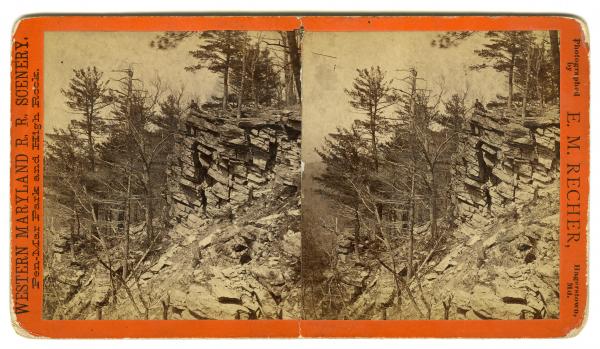
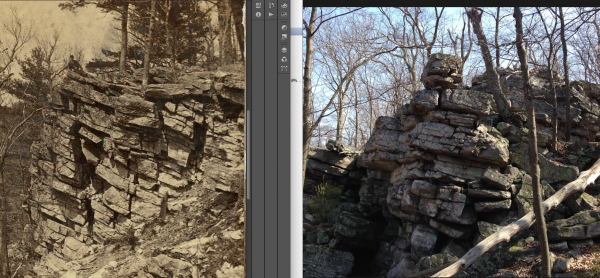
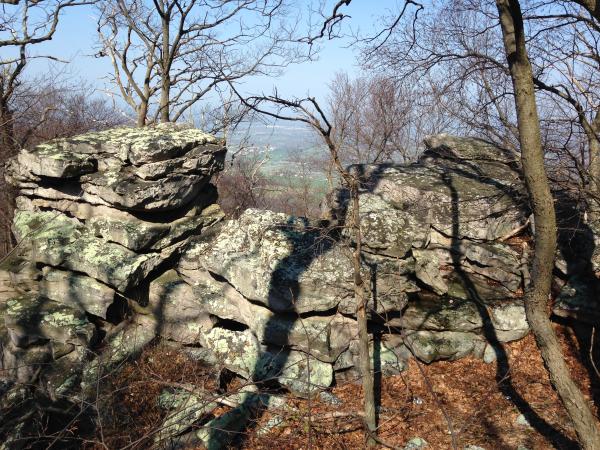

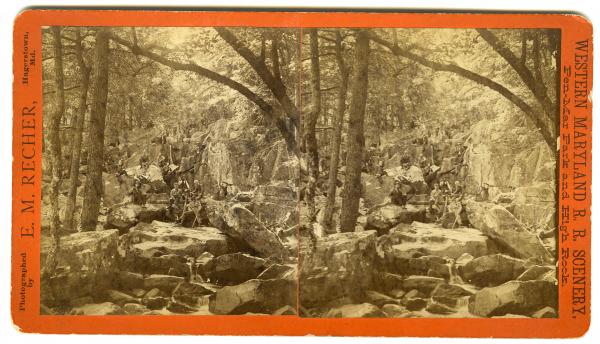
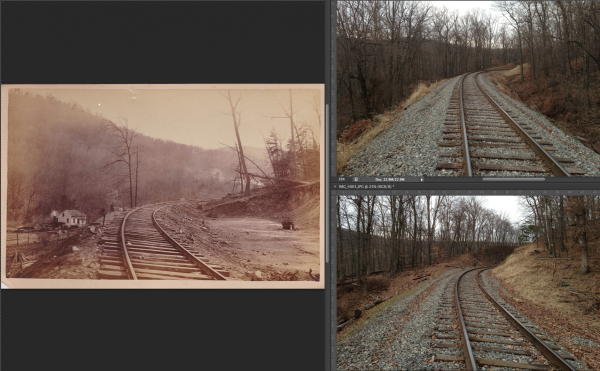
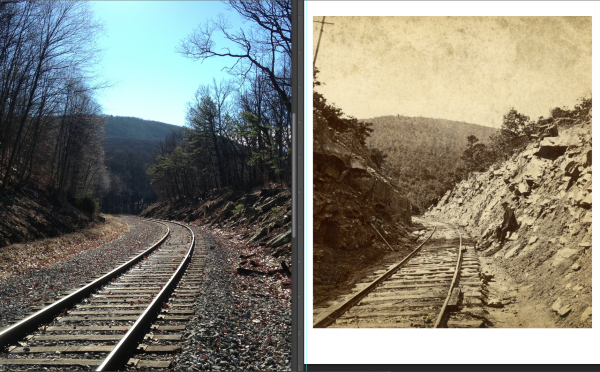
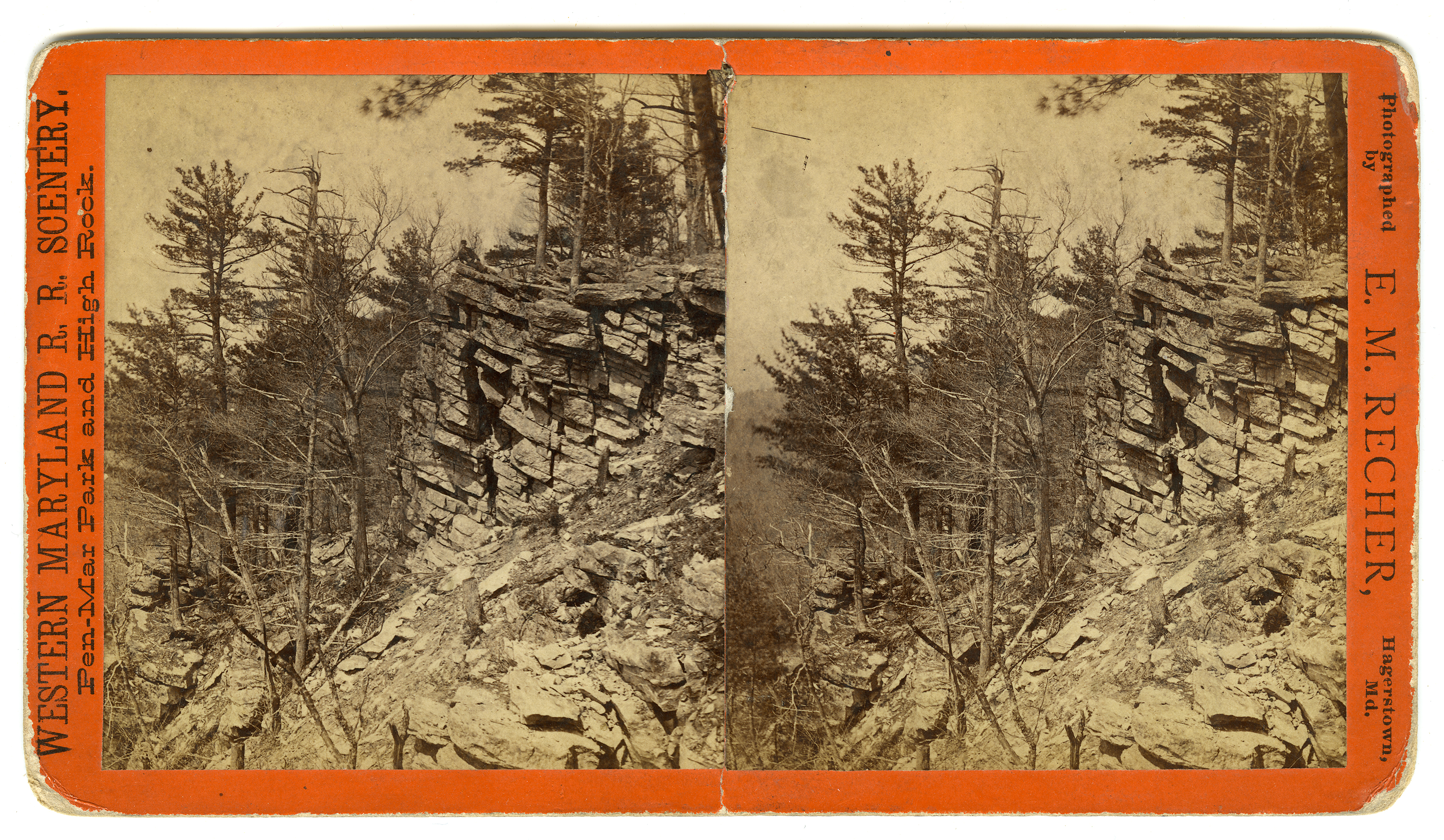
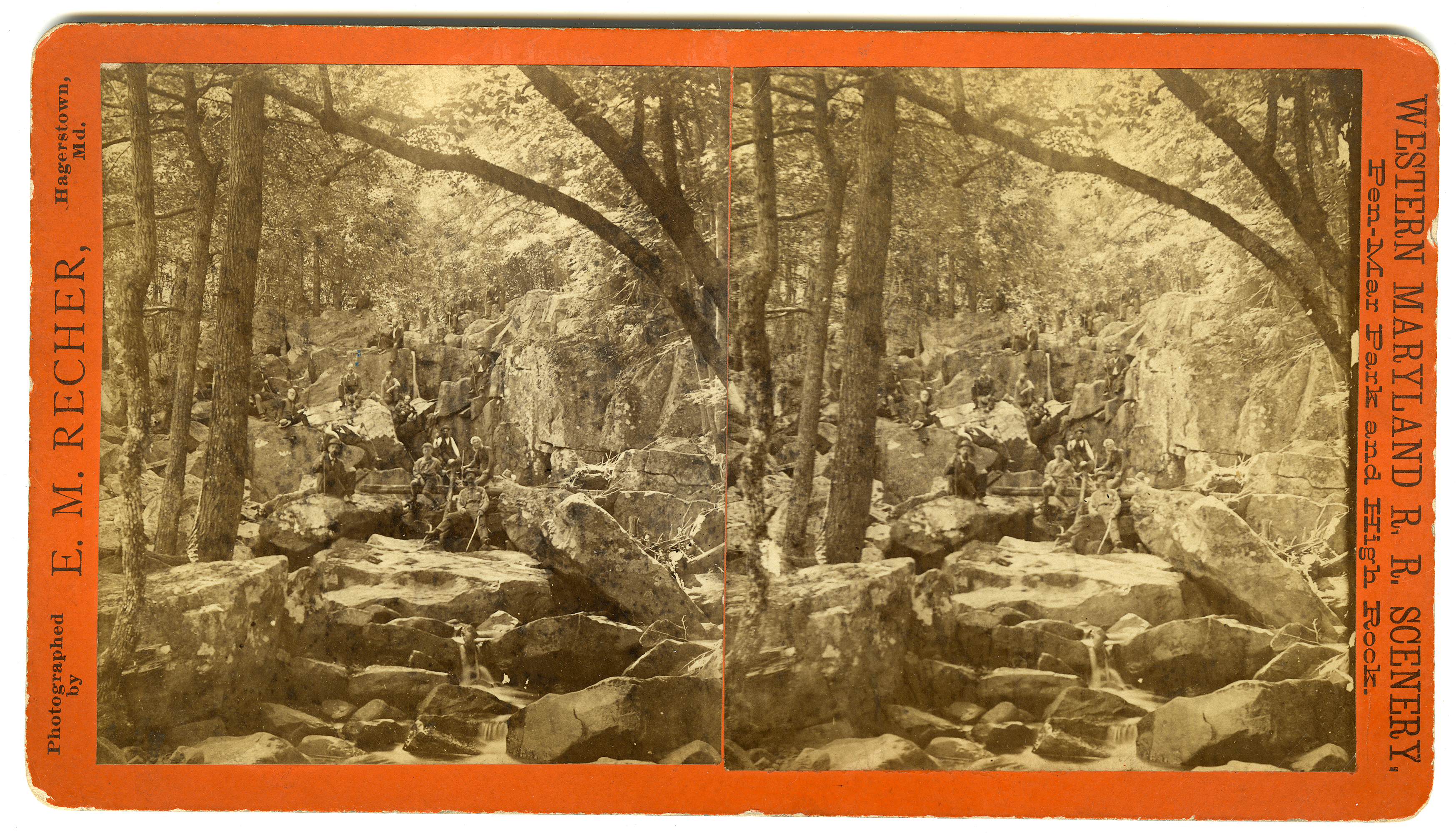
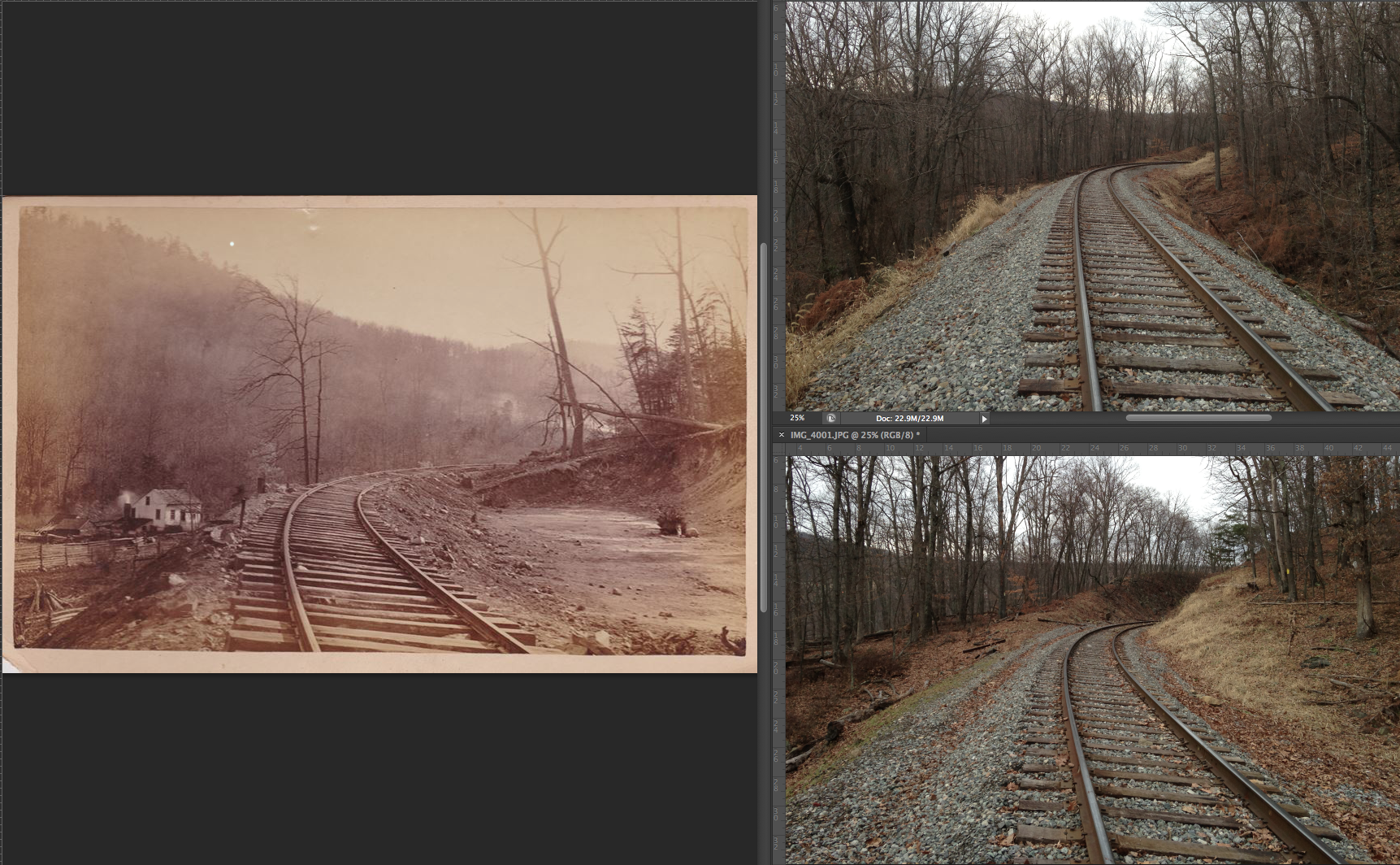
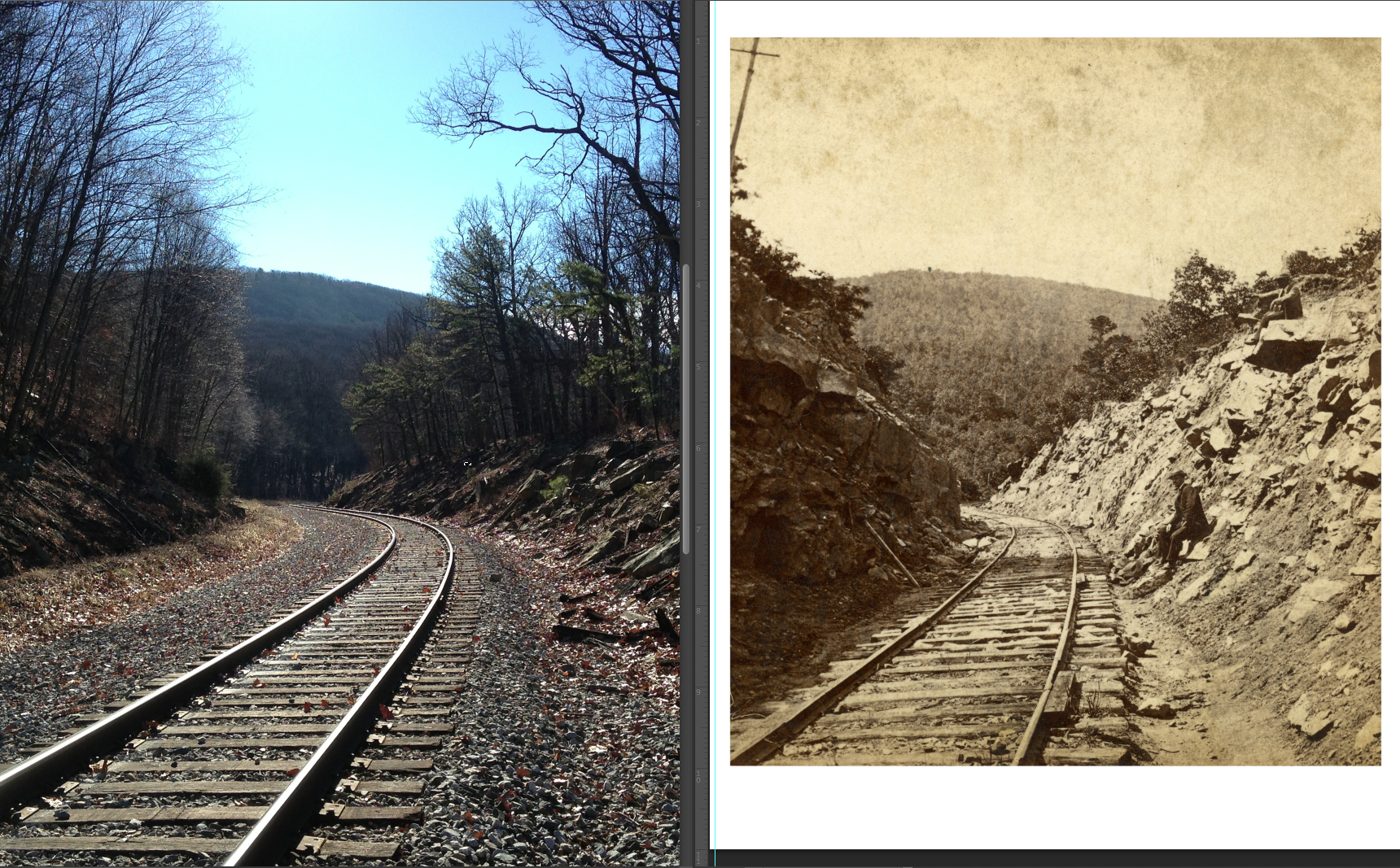
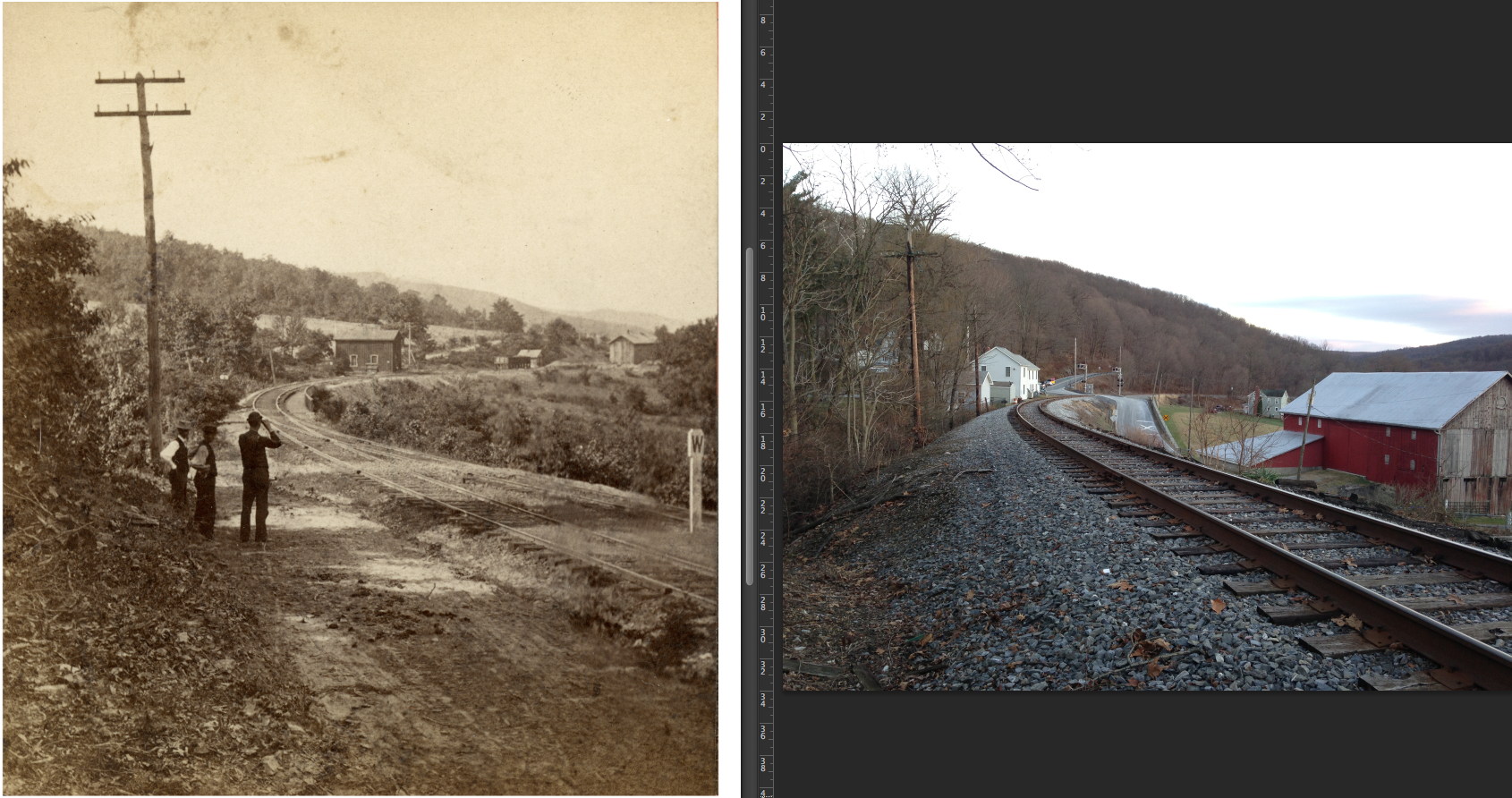
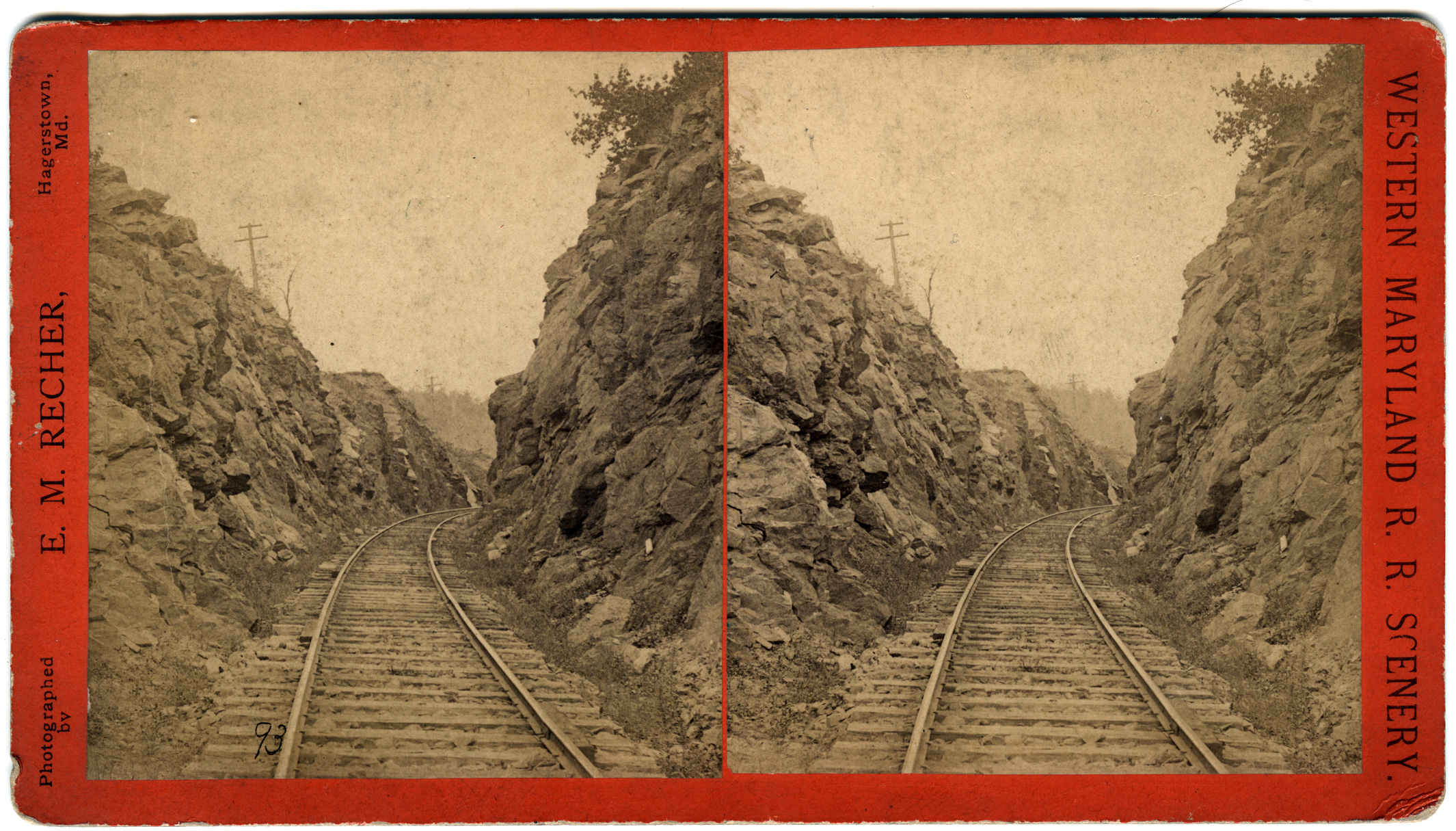
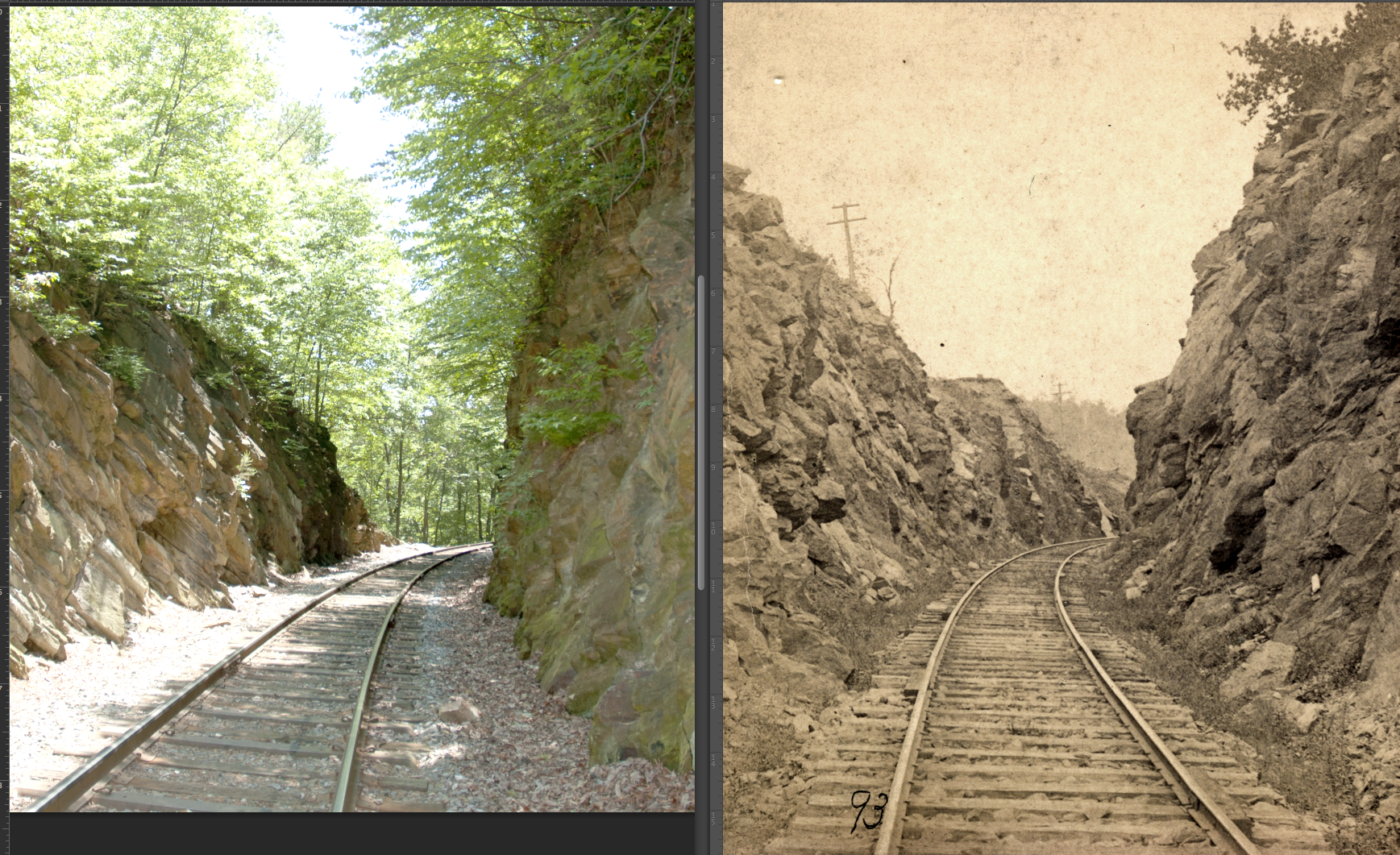
 That said, I did get some beautiful images and am confident that I was at the right spot, or at least the general area. I am not confident that I found the exact rocks, certainly not the ones in the then and now above. It occurs to me, though, that the rocks may have fallen in the 130 years since the photograph was taken, so this may take some time. Also, the rock cliffs there are very precarious and there is a very long rock slide ledge to examine, easily a quarter-mile long.
That said, I did get some beautiful images and am confident that I was at the right spot, or at least the general area. I am not confident that I found the exact rocks, certainly not the ones in the then and now above. It occurs to me, though, that the rocks may have fallen in the 130 years since the photograph was taken, so this may take some time. Also, the rock cliffs there are very precarious and there is a very long rock slide ledge to examine, easily a quarter-mile long.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}